
Arnold for Houdini下载 v5.0 汉化版一键举报
大小:223MB 版本:免费版 分类:图形图像 系统:安卓
免费下载需跳转至第三方下载- 软件信息
- 同类热门
- 攻略推荐
简介
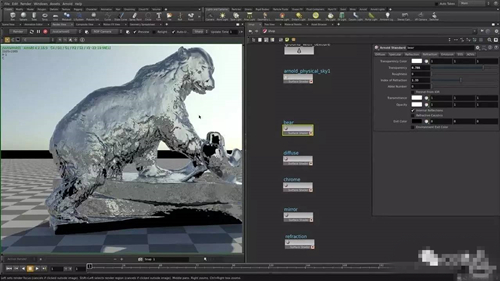
Arnold for Houdini破解版是一款非常有名的渲染器,主要被应用于电影、电视、动画方面。这款软件能够为用户提供一个非常简洁直观的操作界面,相关用户在这里可以轻而易举的进行图片渲染,这样就能够使得原本普普通通的图片变得充满创意,显得非常真实自然。
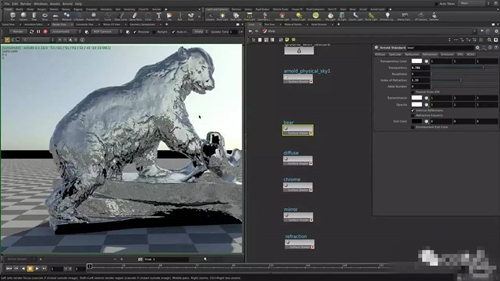
Arnold for Houdini汉化版是一款专门针对Houdini所打造的多功能渲染神器,这款软件不仅汇聚了非常丰富的模板而且还能够为用户提供傻瓜式的操作步骤,相关用户在这里可以进行GPU渲染、Microfacet多重散射等一系列操作,这样就能够大大提升相关用户的效率。
Arnold for Houdini破解版软件功能
1、GPU渲染(BETA):您现在可以交互式地在CPU和GPU渲染设备之间切换,并期望在视觉上获得类似的结果。支持从图灵到麦克斯韦架构的NVIDIA?GPU,软件将利用多个GPU,NVLink和NVIDIA RTX硬件加速光线跟踪(如果有)。请注意,由于GPU渲染的beta状态,缺少许多功能,性能不是最终的,因此不建议在生产中使用。我们计划在后续版本中逐步改进此功能,并感谢您的反馈。
2、改进的自适应采样:自适应采样现在使用更有效的标准。使用新度量标准,像素将以更平滑且更可预测的方式逐渐降低,从而导致相同噪声级别的渲染时间更短。此外,以前仅在渐进式渲染模式下可用的自适应采样标准窗口现在也可以非渐进模式使用,从而产生更高质量的采样,具有更少的采样“漏洞”。
3、改进的天幕采样:当重要采样天幕时,阿诺德现在考虑了着色点的法线。因此,天文学中的明亮区域在低于正常水平时不太可能“窃取”样本。即使对于更均匀的彩色天幕,改进的采样器将在低于半球的方向上浪费更少的样本,允许使用更低的天幕光采样率,这应该提供显着的加速。对于相同数量的阴影光线投射,新采样器的性能开销仅为2%~2%。请注意,天桥样本需要从其原始值(3而不是4)降低到70%或更低,以大致保持阴影射线的数量和相关成本相同。
4、可见光:quad_light,disk_light,cylinder_light和point_light现在具有摄像头和传输属性,允许这些灯对摄像机和传输光线可见。默认情况下,这些属性保留为0,因此不会更改不可见灯的默认行为。
5、Microfacet多重散射:标准表面着色器中使用的GGX microfacet BSDF已经过改进,可以解决微平面之间的多次散射问题,这在物理上是正确的并且减少了反射时的能量损失,尤其是在较高的粗糙度设置下。特别是粗糙金属的反射将显着更亮并且更加饱和。不幸的是,当包括多次散射分量时,由于更难以采样,噪声会略微增加。禁用全局选项enable_microfacet_multiscatter将恢复先前的外观。
6、改进的随机漫步SSS:增加了一种新的randomwalk_v2 SSS模式,通过高度透明/光学薄的物体更精确,更深地散射,从而在物体的精细表面细节和背光区域周围产生更多饱和色彩的SSS。请注意,渲染将比使用原始方法更昂贵和更嘈杂,因为随机漫游平均更长且更随机。
7、标准曲面中涂层的各向异性控制:我们在标准曲面着色器中添加了两个新参数:coat_anisotropy和coat_rotation,以便对涂层进行更精细的艺术控制。
8、支持standard_surface中的负transmit_extra_roughness:standard_surface着色器中的参数transmission_extra_roughness现在接受负值,允许单独控制镜面和传输粗糙度以用于艺术目的。
9、standard_surface中的可链接传输深度:transmission_depth参数现在是可链接的。
10、漫反射中改进的涂层:在反射物体上禁用焦散时,现在可以正确考虑standard_surface着色器上的涂层。
11、改进了凹凸和法线贴图:内置着色器(如bump2d,bump3d和normal_map)现在可以校正非物理着色法线,同时保留细节。在渲染法线贴图海洋表面或使用极端法线贴图时,这应该更加明显。
12、智能不透明:内置着色器现在根据着色器设置是否需要禁用对象上的opaque标志来自动设置object.opaque标志。例如,不再需要手动禁用opaque标志以获得玻璃着色器的透明阴影。当使用min_pixel_width和OSL着色器时,值得注意的例外是曲线和点。自定义着色器可以利用此设置标记着色器属性和元数据。
13、请注意,具有透明度但opaque标志设置为false的设置现在将被视为透明。要保留以前的外观,可以使着色器不透明,或使用光线开关使其仅对阴影不透明。
14、程序上的操作员连接:操作员图形现在可以通过操作员参数连接到程序。程序或嵌套过程中的节点仅由图形进行评估,其中所有内容都是相对于过程的名称范围(如选择表达式)执行的。此外,运算符创建的节点放在程序的名称范围内。
15、新的include_graph运算符:include_graph运算符允许从.ass文件导入运算符图,其中target参数指定包含的子图中的目标运算符。如果着色器存在于.ass文件中,操作员也可以加载这些着色器,并根据操作员的连接将它们放在适当的名称范围内。
16、范围内的子操作符:子操作符现在位于其父操作符的名称范围内,其中可以连接一组子操作符以强制执行特定的评估顺序。
17、MaterialX操作员改进:更新了MaterialX库和操作员。Swizzles现在可用于定义着色器节点之间的通道连接。Float数组处理已经扩展到处理其他数组类型,如color3array,以支持渐变着色器。现在自动设置软件节点定义的搜索路径。运算符根据当前名称范围匹配赋值,即程序或全局命名空间。
18、Alembic程序中的细分折痕支持:Alembic程序现在将检测和转换细分曲面的折痕数据。
19、改进的ramp_rgb着色器:添加了几种新的插值模式,以及一个implicit_uvs参数,它允许使用重心隐式UV来驱动渐变,而不是常规UV。最后一个选项对头发特别有用。
20、渐变着色器中的新时间模式:渐变和ramp_rgb着色器现在具有附加时间模式,可根据当前sg->时间和相机的开始和结束快门间隔计算输入。
21、新的uv_projection着色器:此着色器允许执行平面,球形,圆柱形,球形,立方体和shrink_wrap投影。
22、新的matrix_interpolate着色器:此着色器允许通过在矩阵值之间进行插值来生成运动模糊矩阵参数。
23、camera_projection中的新coord_space控件:您现在可以选择在世界或对象空间中进行相机投影,或者使用Pref用户数据,或将任何着色器链接到输入位置P参数。
24、背景的UV坐标:在背景着色期间,现在从相机光线的屏幕坐标生成UV坐标。因此,现在可以直接将基于UV的着色器链接到options.background,例如图像,棋盘格或渐变。
25、去噪反照率:内置的AOV和经过优化去噪的反照率已被添加为denoise_albedo。如果存在,Arnold(noice)和OptiX?降噪器都将使用新的AOV。
26、OptiX降噪器改进:更新至Optix?6,可在Turing?硬件上实现质量,内存消耗和性能的降噪改进。
27、更快的样品生成:使用高相机AA样品和大量光源或其他二次样品进行渲染有时会导致启动时间非常慢。例如,AA=18且point_light.samples=18的场景需要11分钟才能开始;它现在只需要几分之一秒。
28、更快的.ass文件写入:写入.ass文件,特别是在某些Windows网络上,可以大大加快。一位客户看到了51倍的加速。
29、更快的OSL UDIM纹理读取:在OSL中读取UDIM纹理现在要快得多,报告的加速比高达10倍。
30、减少曲线实例的内存使用:曲线节点中的uvs和shidxs数组不再为曲线节点的每个实例重复,从而显着减少了实例曲线的内存占用。
31、Maketx单色地图检测:maketx现在默认检测RGB图像的频繁情况,可以存储为单个通道。这可以导致更小的.tx文件并节省时间内存。
32、运动矢量AOV使用相机快门:为了便于使用运动矢量,全局选项options.ignore_motion_blur现在保持运动键并且仅将相机光线时间设置为等于options.reference_time-将此与运动矢量一起使用而不是将快门间隔设置为零。新的全局选项options.ignore_motion将接管忽略所有运动键的预先存在的ignore_motion_blur功能。
33、新的OCIO角色:arnold_srgb_equivalent已被添加为较旧的srgb_equivalent的同义词,以明确这是一个Arnold角色。
Arnold for Houdini破解版软件特色
1、所有具有景深和高级快门控制的软件摄像机(透视,正射,球面,鱼眼镜头)。
2、所有灯光(点,远,点,四边形,圆盘,圆柱,天穹,网格)均带有滤光器和准确的视口表示。
3、自定义软件着色网络上下文,其中包含106个着色器和实用程序的完整列表。
4、大气和背景影响。
5、支持OpenVDB和粒子的体绘制。
6、多边形,曲线,点,支持位移,凹凸贴图和细分。
7、带有示例性Alembic和mandelbulb实现的过程。
8、精确的运动模糊(变形,变形,速度,加速度),每个对象都可以覆盖。
9、几何属性转换为用户数据。
10、对象和相机的可选软件属性。
11、以单个文件或单独文件呈现为AOV。
12、支持所有Houdini渲染上下文(渲染区域,mplay,渲染查看器,渲染COP,批处理),并支持AOV和可点击桶。
13、交互式渲染(IPR)允许快速预览参数更改而不会中断您的工作。
14、实例化。
15、多摄像机渲染。
16、DeepEXR支持。
Arnold for Houdini破解版使用说明
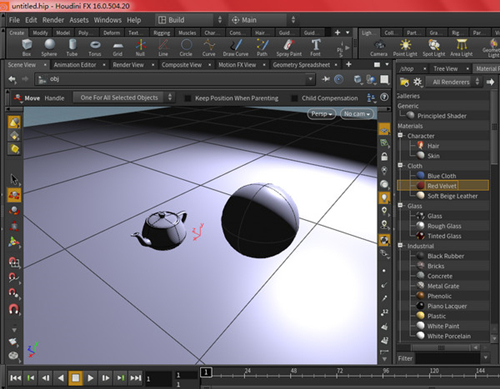
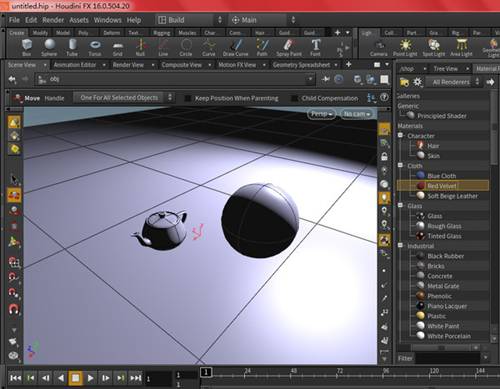
1、场景设置
首先打开这个 开始场景。在场景中,您应该看到机器人模型和简单的工作室背景模型。
现在我们要点亮我们的工作室场景。首先创建三个Arnold 灯。这可以通过单击软件架子上的灯图标来完成。将灯光类型更改为Quad。
在机器人上方定位并缩放一个灯,在中心位置另一个灯。旋转它们,使它们朝向机器人指向内部,如下面的screengrab所示。
2、灯光设置
渲染时场景可能会显得较暗。因此,我们需要增加灯光的曝光。在软件属性下,将每次曝光的曝光增加到大约5。
3、轻型样品
您可能会注意到区域灯光阴影中的一些噪音。这是因为默认情况下灯的样本设置为1。要降低噪点,请尝试将光样本增加到3.此设置可在每个灯光中的软件属性中找到。光样本控制柔和阴影中的噪声质量和直接镜面反射高光。样本数量越多,噪声越低,渲染时间越长。
4、底纹
将标准曲面着色器指定给机器人。要将其变成拉丝金属材料,我们将更改以下设置。增加 Metalness 至约1和改变 基本色 的彩色中灰,降低 镜面重量 为0。 镜面粗糙度 ? ontrols的镜面反射的光泽度。值越低,反射越清晰。将它增加到0.5左右。
5、相机景深
我们可以使用Houdini的原生 相机 使用景深渲染场景。创建一个摄像头并将其重命名为'RenderCam'。
选择“ 启用景深”。除非增加光圈大小,否则您不会注意到渲染中的任何差异。当您增加 “光圈大小”时, 您应该看到机器人的头部处于相机焦点。尝试低值,例如0.1(此值取决于场景比例)。
6、渲染
使用默认的Camera(AA)设置3 渲染场景对于测试渲染来说已经足够了。但是,对于最终渲染,您需要将此值增加到至少5或更多,具体取决于您在场景中设置的景深量。
由于机器人着色器的间接镜面反射分量采样不良,机器人表面可能会出现一些明显的光泽镜面噪声。将全局 Specular 值增加到3有助于解决此噪声并创建更清晰的渲染。
7、采样和噪音
噪声几乎总是来自不充分的采样,但增加错误光线的采样可以使渲染时间增加而不会有助于消除噪声。目的是尽可能有效地分配射线,以最有效的方式最小化噪声。因此,如果必须增加相机样本以去除DOF噪声,则必须降低其他设置以保持渲染时间的可管理性。但是,如果不考虑DOF或运动模糊,那么增加相机样本会将所有噪声固定在其他地方,但也会减慢不必要光线的渲染时间。
Arnold for Houdini破解版常见问题
1、标准着色器在哪里?
旧的 标准 着色器已替换为 标准曲面 着色器。旧的标准着色器仍然附带Arnold作为传统着色器,以便与旧场景兼容。但是,它将在以后的版本中删除。
2、标准表面着色器是否节能?
如果所有的各个权重和颜色的是小于或等于1.0,则标准的表面着色器是 能量节约。与旧的标准着色器不同,您无需担心权重总和小于1.0或手动启用Fresnel(始终启用)。
3、标准曲面着色器中的“折射粗糙度”在哪里?
的镜面粗糙度同时影响镜面反射和折射。 在透射中还有一个 额外粗糙度参数, 为折射添加一些额外的粗糙度。但是,您可以使用 Coat 在锐利折射上创建粗糙反射层。
4、镜面GGX微平面分布在哪里?
GGX现在是标准曲面 着色器的默认模型 。
5、如何控制透明材料的折射率?
您可以以相同的方式使用Specular IOR属性来处理透明材质,例如玻璃,钻石等。
6、如何在标准曲面着色器中控制背光/半透明?
使 薄壁 和设置 地下重量 到,例如,0.5至有一半的光反射和透射一半。
-
点击下载

批量图片转视频软件
图形图像|55.7 MB
更新时间:2023-08-13
-
点击下载

神狐录像机PC版
图形图像|2.5 MB
更新时间:2023-08-13
-
点击下载

柜柜3.5.0.0
图形图像|166.39MB
更新时间:2023-08-06
-
点击下载

百度网盘AI修图软
图形图像|257.3 MB
更新时间:2023-07-31
-
点击下载

微海录屏小工具 1
图形图像|54.4 MB
更新时间:2023-07-31
-
点击下载

转易侠图片转换器
图形图像|4.6 MB
更新时间:2023-07-11
-
点击下载

XnConvert
图形图像|43.96MB
更新时间:2023-04-28
-
点击下载

米画师最新版本
图形图像|93.48MB
更新时间:2023-02-24
-
点击下载
Abelssoft
图形图像|48.6MB
更新时间:2023-01-11
-
点击下载

PK990图片格式
图形图像|585KB
更新时间:2023-01-06










相关推荐
-
Character Tool插件 1.0.4 绿色版
1024 bytes / 图形图像
下 载 -
柜柜3.5.0.1 免费版
167.54MB / 图形图像
下 载 -
billfish素材管理工具 3.0.20.1 免费版
1.71 MB / 图形图像
下 载 -
rEASYze v2.9.1 免费版
256KB / 图形图像
下 载 -
录大咖水印管家v1.0.3.0
1.22MB / 图形图像
下 载 -
Algolab Photo Vectorv1.98.56.0
1.80MB / 图形图像
下 载

意见反馈 | 意见收集 浙ICP备2024127316号-1

本站资源均收集整理于互联网,其著作权归原作者所有,如果有侵犯您权利的资源,请来信告知,我们将及时撤销相应资源。联系方式:2938377379@qq.com